|
Lars Paulsen
I am a Master's student in Mechanical Engineering at UC San Diego, where I am advised by Prof. Xiaolong Wang on improving teleoperation methods and user control.
|
|
ResearchI want to develop robots as dexterous as humans and improve their performance in highly dynamic environments. |

|
ACE-F: A Cross Embodiment Foldable System with Force Feedback for Dexterous Teleoperation
Rui Yan*, Jiajian Fu*, Shiqi Yang*, Lars Paulsen*, Xuxin Cheng, Xiaolong Wang Under-Review project page A new, low-cost, low-complexity teleoperation system with a novel force-feedback controller. |
|
Humanoid Policy ~ Human Policy
Ri-Zhao Qiu*, Shiqi Yang*, Xuxin Cheng*, Chaitanya Chawla*, Jialong Li, Tairan He, Ge Yan, David J. Yoon, Ryan Hoque, Lars Paulsen, Ge Yang, Jian Zhang, Sha Yi, Guanya Shi, Xiaolong Wang CoRL, 2025 project page / arXiv Using ego-centric human demonstrations as cross-embodiment training data for robot learning. |
|
[In-Progress] A Novel Device for Magnetizing Hard Magnetic Materials
Lars Paulsen*, Mahtab Shakibmanesh*, Camilo Velez Cuervo A novel device for orienting magnetic fields during 3D printing. |
Other ProjectsHere are some of my other projects borne out of personal interests and classwork. |
|
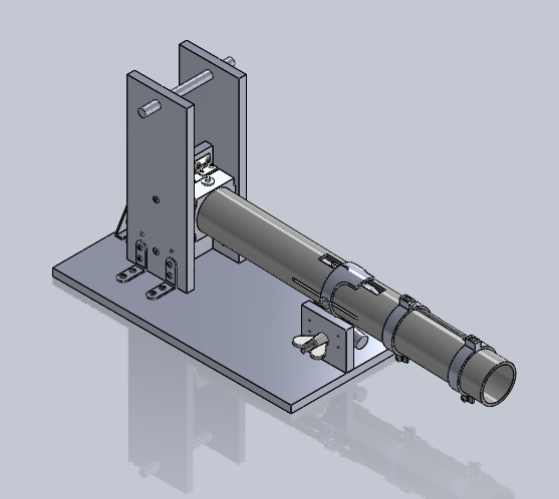
Golf Ball Launcher
supplementary info A mechanical golf ball launcher with built-in trajectory generator and integrated arming and launching mechanisms. |


|
FIRST Robot Competition
supplementary info An industry-sized robot challenge where I led CAD, design meetings, and manufacturing for three years. |
|
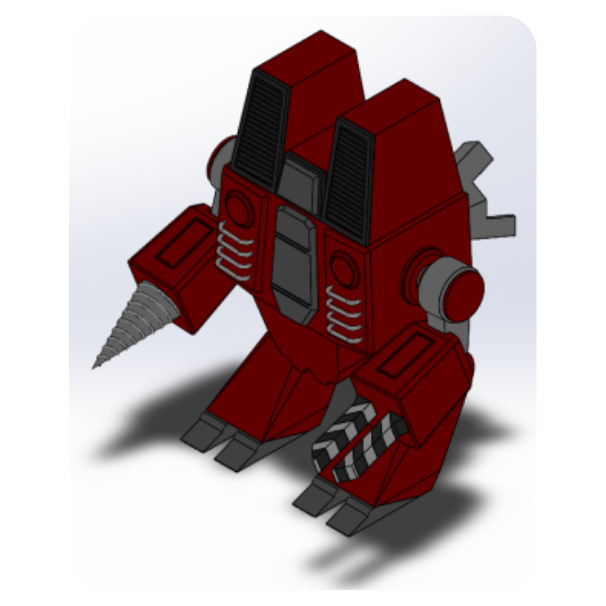
Starcraft II SCV
I modeled a Starcraft II SCV in Solidworks as a class final project, which included its tapered, helically threaded drill. |

|
Pneumatic Maze Robot
A robot driven by a pneumatic piston for navigating mazes using dead reckoning. |
|
|
HVAC Exploration Robot
A miniature track robot for inspecting vent interiors. |

|
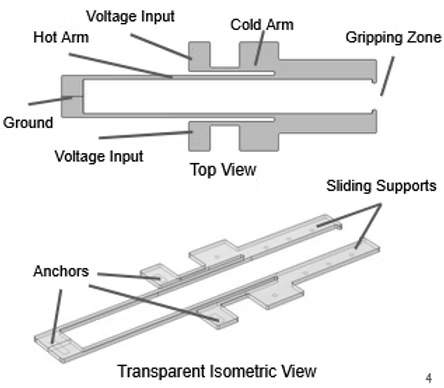
Electromechanical Thermal Microgripper
supplementary info A novel electrothermally actuated microgripper for isolationg pharmaceutical microcapsules. |

|
Solar Car
supplementary info Steering and braking systems for a solar powered racecar. |

|
Baseball Glove Prosthetic Insert
I designed and constructed a glove insert under the guidance of local doctors for an amputee to play softball. |

|
Wildlife Rehabilitation Volunteering
I designed and constructed bird splints and a pool ramp for recovering animals at a wildlife rehabilitation center. |
Miscellaneous |
Teaching |
Graduate Student Instructor, PHYS2CL Fall 2024 |
|
Feel free to steal this website's source code. Do not scrape the HTML from this page itself, as it includes analytics tags that you do not want on your own website — use the github code instead. Also, consider using Leonid Keselman's Jekyll fork of this page. |